Elementy robotyki inteligentnej (Intelligent robotics):
Ćwiczenie 1 (do pracy zdalnej i w laboratorium):
[ sciagnij ]
Ćwiczenie 2 (do pracy w laboratorium):
[ sciagnij ]
Ćwiczenie 2 (do pracy zdalnej):
[ sciagnij ]
Ćwiczenie 3 (do pracy zdalnej i w laboratorium):
[ sciagnij ]
Ćwiczenie 4 (do pracy w laboratorium):
[ sciagnij ]
Ćwiczenie 4 i 5 (do pracy zdalnej):
[ sciagnij ]
Ćwiczenie 5 (do pracy w laboratorium):
[ sciagnij ]
Zagadnienia na zaliczenie:
[ sciagnij ]
Wczytywanie danych C++:
[ sciagnij ]
Literatura pomocnicza do ćwiczeń i wykładu (Books):
Piotr Kulczycki, Józef Korbicz, Janusz Kacprzyk, tytuł: Automatyka, robotyka i przetwarzanie informacji(Miękka), wyd. PWN, rok 2020 (literatura podstawowa)
Choset, H.: Principles of robot motion theory, algorithms, and implementations, MIT 2005 (literatura podstawowa)
Bekey, G.A.: Autonomous robots: from biological inspiration to implementation and control, MIT 2005 (literatura uzupełniająca)
Piotr Artiemjew: Wybrane Paradygmaty Sztucznej Inteligencji, Monografie Naukowe - Tom 10, Wydawnictwo PJWSTK, 2013 (inna polecana)
Anand Rajaraman, Jure Leskovec, Jeffrey D. Ullman: Mining of Massive Datasets, Cambridge University Press, 2013 (dostepna
online) (inna polecana)
Russel, Norwig: Artificial intelligence: a modern approach, 2005 (inna polecana)
Zaawansowana robotyka inteligentna (Advanced intelligent robotics):
Ćwiczenie 1 (do pracy zdalnej i w laboratorium):
[ sciagnij ]
Ćwiczenie 2 (do pracy w laboratorium):
[ sciagnij ]
Ćwiczenie 3_v1 (do pracy w laboratorium):
[ sciagnij ]
Ćwiczenie 3_v2 (do pracy w laboratorium):
[ sciagnij ]
Ćwiczenie 4 (do pracy w laboratorium):
[ sciagnij ]
Ćwiczenie 5 (do pracy w laboratorium):
[ sciagnij ]
Literatura pomocnicza do ćwiczeń i wykładu (Books):
Probabilistic Robotics, Sebastian Thrun, Wolfram Burgard, Dieter Fox, MIT
Press, 2005 (literatura podstawowa)
Introduction to Autonomous Robots: Mechanisms, Sensors, Actuators, and
Algorithms, Nikolaus Correll, Bradley Hayes, Mac Schwager, MIT Press, 2022 (literatura podstawowa)
Artificial Intelligence for Robotics, Francis X. Govers, Packt Publishing, 2018, (literatura uzupełniająca)
Robotics: Modelling, Planning and Control, Bruno Siciliano, Lorenzo Sciavicco,
Luigi Villani, Giuseppe Oriolo, Springer, 2009 (literatura uzupełniająca)
Programy studentow - uzywaj na wlasna odpowiedzialnosc (software developed by students - USE AT YOUR OWN RISK):
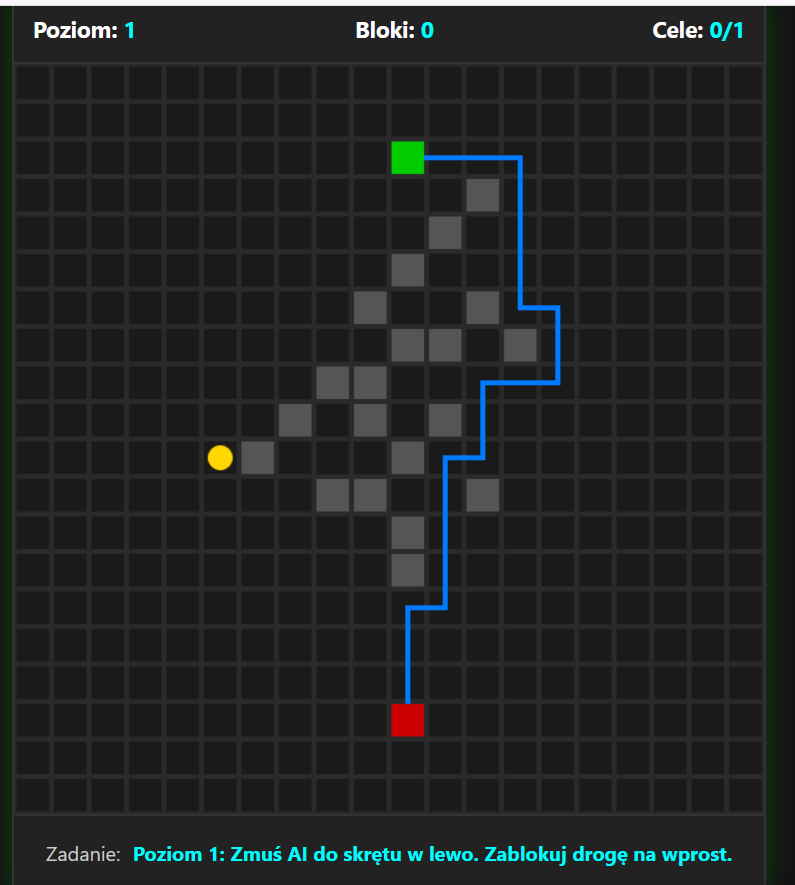
Gra Path Master autor: Konrad Krystian Zajączkowski
Opis: Program zostal wykonany w ramach ćwiczeń ZRI. Aplikacja internetowa demonstruje dzialanie filtru partykulowego na mapie 2D. Program jest interaktywny, uzytkownik moze sterowac robotem na mapie, widzac efekt lokalizacji.
(Demonstration of the use of the A* algorithm in a game whose objective is to compel artificial intelligence to pass through all Golden Points.)
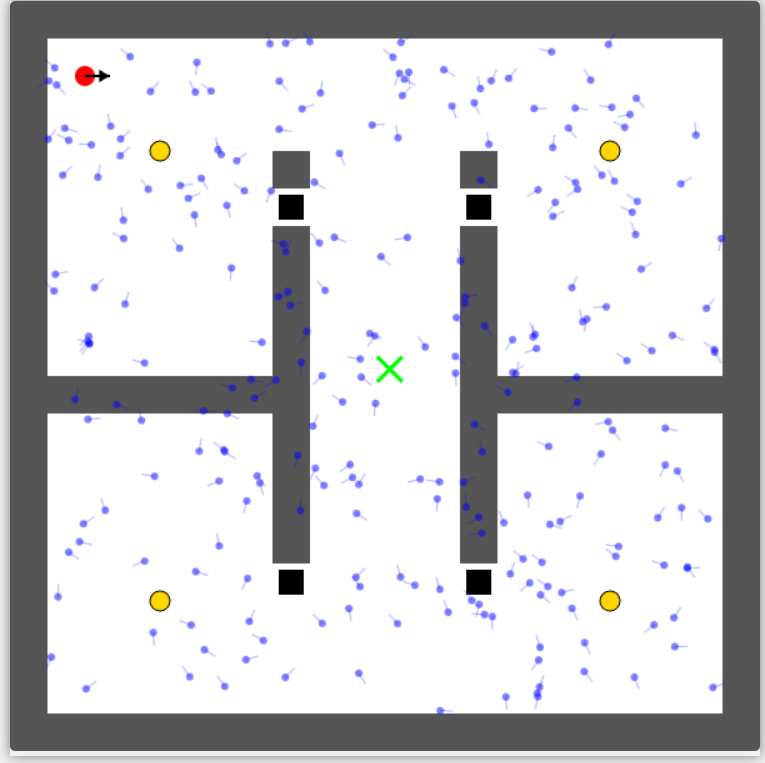
Interaktywny filtr partykulowy 2D demonstracja dzialania - interactive particle filter 2D autor: Gabriel Majewski
Opis: Program zostal wykonany w ramach ćwiczeń ZRI. Aplikacja internetowa demonstruje dzialanie filtru partykulowego na mapie 2D. Program jest interaktywny, uzytkownik moze sterowac robotem na mapie, widzac efekt lokalizacji.
(The programme was developed as part of ZRI exercises. The web application demonstrates the operation of a particle filter on a 2D map. The programme is interactive; the user can control the robot on the map and see the effect of localisation.)
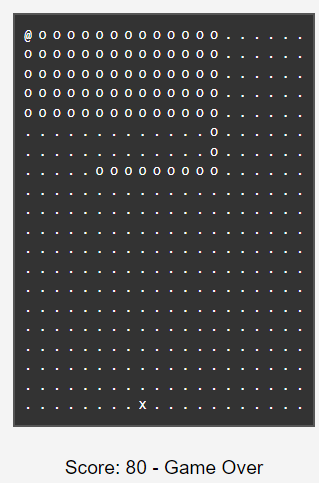
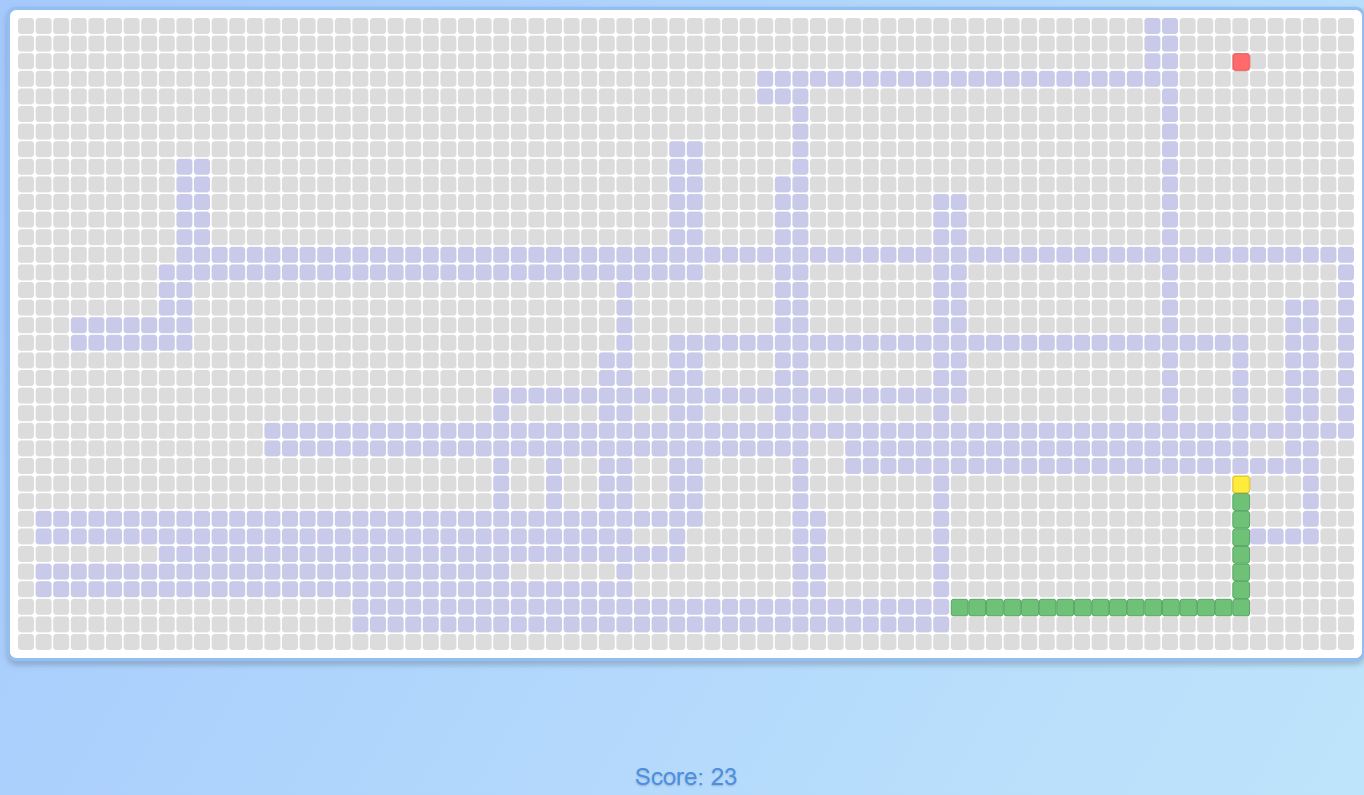
Symulator A gwiazdka bazujacy na AI - relaksujacy snake (relaxing snake AI) autor: Maciej Dylak
Opis: Program zostal stworzony jako demonstracja dzialania algorytmu A*, powstala w ramach ćwiczeń ERI. Calosc osadzona jest w konwencji gry Snake, w ktorej waz zjada kolejne kropki i probuje przetrwac jak najdluzej. Projekt ma na celu zapewnienie relaksujacego doswiadczenia, ktore mozna obserwowac w wolnej chwili.
(The programme was created as a demonstration of how the A* algorithm works, created as part of an ERI exercise. The whole thing is set in the convention of the Snake game, in which a snake eats a succession of dots and tries to survive as long as possible. The project aims to provide a relaxing experience that can be observed at leisure.)
[ uruchom (play) ]
[ uruchom (play) ]
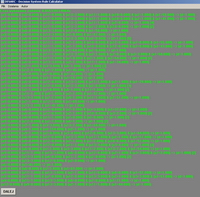
Demonstracja dzialania Benchmarkingu na algorytmach sortowania (This is demonstration of Benchmarking for sorting algorithms) autor: Andrii Shatkovskyi
Opis: W paczce jest plik instalacyjny i informacje szczegolowe. Program jest napisany w C#.
(Archive contains the installation files. There are details inside. Written in C#.)
[ sciagnij (download) ]
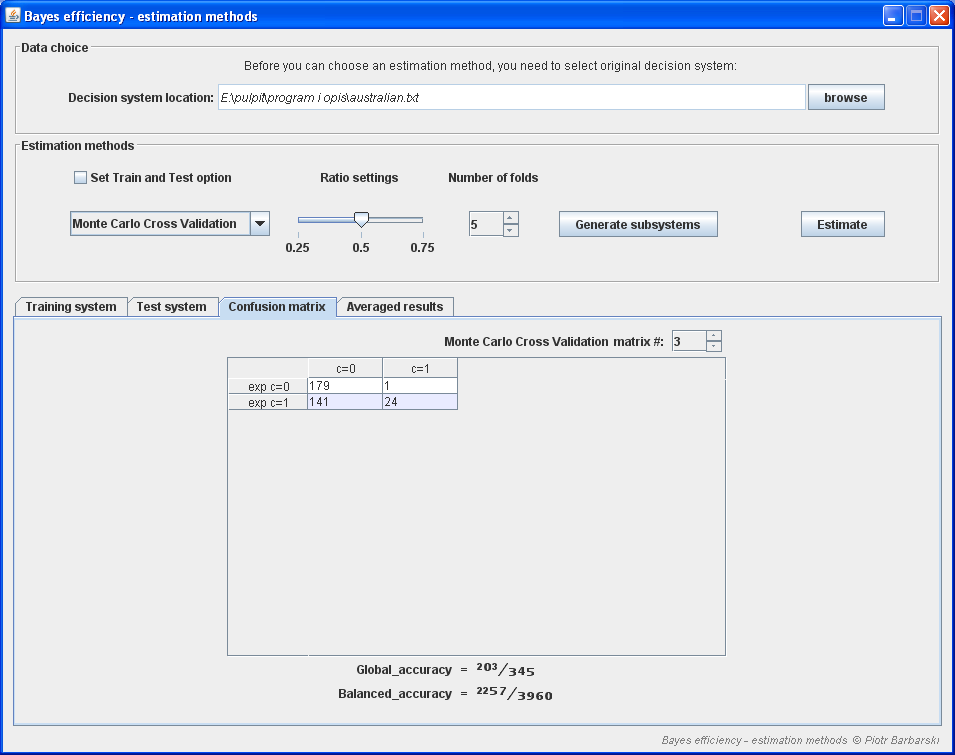
Metody szacowania jakosci klasyfikacji Bayesowskiej(Estiation of effectiveness of Naive Bayes classifier) autor: Piotr Barbarski
Opis: Program napisany w jezyku JAVA. Zaimplementowano metody Cross Validation, Monte Carlo Cross Validation i Bagging w celu sprawdzenia efektywnosci Naiwnego klasyfikatora Bayesa.
(The program has been written in the Java language. It is implementation of Cross Validation, Monte Carlo Cross Validation and Bagging methods, for estimation of effectiveness of Naive Bayes classifier)
[ sciagnij (download) ]
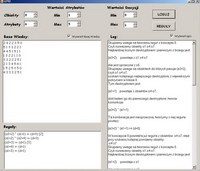
Naiwny Klasyfikator Bayesa (Naive Bayes Classifier) autor: Piotr Barbarski
Opis: Program napisany w jezyku JAVA, implementujacy klasyfikator Bayesa. Problem zerowych wartosci (zerowej licznosci danego deskryptora w klasie decyzyjnej) zostal rozwiazany poprzez faworyzowanie klas zawierajacych dana wartosc deskryptora. Konflikty podczas klasyfikacji rozwiazywane sa poprzez nadawanie losowej decyzji. Program pozwala na wczytanie dowolnego systemu testowego i treningowego zawartego w pliku tekstowym. W odpowiednich zakladkach mozna odczytac miedzy innymi wyniki poszczegolnych krokow dzialania algorytmu oraz koncowy rezultat
(The program has been written in the Java language. It is implementation of Bayes classifier. Problem of zero values was resolved by favoritism of the decision classes. Conflicts occurring during the classification are solved by random decision. The app allows you to load any test and training system placed in a text file. Individual tabs provide informations such as results of each step of the algorithm or final Bayes result)
[ sciagnij (download) ]
Symulator algorytmu A gwiazdka (A star simulator) autor: Tomasz Kilijanski
Opis: Program sluzy do wyznaczania tracy w labiryncie za pomoca algorytmu A gwiadka, program daje mozliwosc wyswietlenia symulacji (wizualizacji) procesu wyszukiwania trasy.
(The program is ueful for path planning in the maze. This is the simulation (visualization), which you can play, and pause.)
![]()
[ uruchom (play) ]
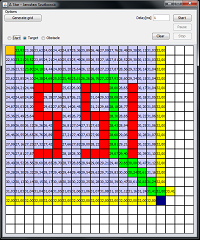
Symulacja algorytmu A gwiazdka w gridzie (A star in the grid - simulator) autor: Jaroslaw Szutkowski
Opis: program napisany w java, sluzy do wyliczania optymalnej trasy od startu do celu, na mapie skladajacej sie z siatki kwadratow pol.
Uzytkownik moze zaplanowac wielkosc mapy, pozycje startowa, docelowa, wskazac pozycje przeszkod i wlaczyc symulacje z opoznieniem ustalonym w milisekundach.
(This is A star algorithm simulation in the grid - developed in java. You can fix start and goal positions, set obstacles and play visualisation with delay in ms. There is movement restriction, robot can move South, West, North, East, and this is also the search order. Ties are resolved hierarchically, by choice the last conflicting value. Cost of single move is one, and for estimation of direct distance to goal we use Euclidean metric. )
[ sciagnij (download) ]
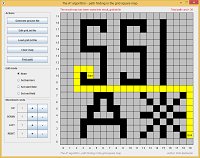
Algorytm A gwiazdka - znajdowanie drogi w siatce kwadratow(The A star algorithm - path finding in the grid square map) autor: Piotr Barbarski
Opis: Program napisany w jezyku JAVA, wyznaczajacy za pomoca algorytmu A gwiazdka optymalna droge od startu do celu, na mapie skladajacej sie z siatki kwadratow pol. Jako heurystyke przyjeto odleglosc Euklidesa. Jedynymi mozliwymi ruchami sa ruchy: gora, dol, lewa, prawa. W takiej kolejnosci przegladane sa tez pola. W przypadku konfliktow wybierane jest ostatnio odwiedzone pole. Uzytkownik moze wygenerowac mape przeszkod z poziomu programu korzystajac z innego programu (generatora). Przeszkody oraz punkty startu i celu moga byc rowniez ustalane za pomoca myszy. Oprocz tego program oferuje mozliwosc zmiany domyslnych kosztow dla kazdego z kierunkow ruchu.
(The program has been written in the Java language. It marks optimum path from start to end point in the grid square map, using A star algorithm. Used heuristics is Euclidean metric. The only allowed movement directions are: up, down, left, right. Fields are visited in the same order. Possible conflicts are arbitrated by selection last visited field. The user can generate map of barriers from within the program, using the external generator. Barriers, start and end points can also be established using a mouse. In addition, this program offers possibility to change default costs for each of movement directions.)
[ sciagnij (download) ]
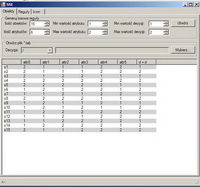
Reduktor (Reductor) autor: Jaroslaw Ksybek
Opis: program sluzy do wyliczania reduktow systemu informacyjnego i decyzyjnego.
(The program is useful for calculating the reducts from an information and decision systems)

[ sciagnij (download) ]
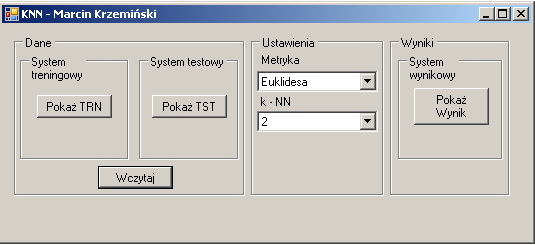
k-NN, podstawowe metryki (basic metrics) autor: Marcin Krzeminski
Opis: Program pozwala klasyfikowac system testowy na podstawie zadanego systemu treningowego metoda
k-NN, 'k' najblizszych sasiadow. posiada piec wbudowanych metryk: Euklidesa, Canberra, Czebyszewa, Manhattan, BWK Pearsona.
do uruchomienia programu wymagane jest posiadanie zainstalowanego frameworka .net w wersji nie mniejszej niz 3.5
(The program allows you to classify the test system based on the training system,
classification method is classic k nearest neighbor classifier, we use five metrics:
Euclidean, Canberra, Chebyshev, Manhattan, Pearson. The Program require framework .net 3.5 or newer)
[ sciagnij (download) ]
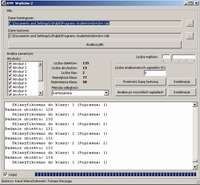
LEM2 rule induction method autor: Robert Kaminski
Opis: Program sluzy do wyznaczania regul z systemu decyzyjnego za pomoca uproszczonej
metody LEM2 (bez parametrow). do uruchomienia programu potrzebna jest platforma ".net".
(The program is an implementation of LEM2 rule induction method (version without parameters),
The Program require framework .net 3.5 or newer)
[ sciagnij (download) ]
Exhaustive rule induction method - symulacja liczenia regul (rule induction simulator) autor: Łukasz Walukiewicz
Opis: Program sluzy do wyznaczania regul z systemu decyzyjnego za pomoca metody exhaustive.
program daje mozliwosc wyswietlenia symulacji (wizualizacji) liczenia regul.
(The program is used to determine the exhaustive set of rules. This is the simulation (visualization), which you can play, and pause.)

[ uruchom (play) ]
k-NN autor: Robert Kaminski
Opis: program symuluje dzialanie klasyfikatora k-nn (przy metryce euklidesowej) (gdzie wybieranych jest k najblizszych sasiadow z kazdej klasy i nastepuje glosowanie
miedzy klasami). do uruchomienia programu potrzebna jest platforma ".net".
(The program allows you to classify the test system based on the training system,
classification method is k nearest neighbor classifier, we use Euclidean metric:
The Program require framework .net 3.5 or newer))

[ sciagnij (download) ]
Desarc autor: Jaroslaw Szatkowski
Opis: Desarc jest programem sluzacym do wyznaczania regul lem2,
exhaustive w systemie decyzyjnym, oraz klasyfikacji algorytmem k-nn.
(Desarc is a program to determine the decision rules based on LEM2 and exhaustive methods, additional functionality is possibility of classification based on k-NN algorithm)
[ sciagnij (download) ]
Operacje genetyczne - algorytm wczesnego stopu (Genetic operations - early stop algorithm) autor: Jacek Proscio
opis: program sluzy do symulacji algorytmu wczesnego stopu w kontekscie uczenia metodami
genetycznymi.
(Early stop algorithm demonstarion in the context of genetic operations)
[ sciagnij (download) ]
Exhaustive autor: Dominik Kolender
opis: program sluzy do wyznaczania regul z systemu decyzyjnego za pomoca metody exhaustive.
do uruchomienia programu potrzebna jest platforma ".net".
(Exhaustive set of rule generator. The Program require framework .net 3.5 or newer)
[ sciagnij (download) ]
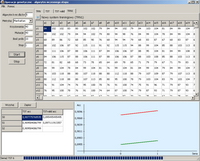
k-NN (T&T) autor: Karol Wierzcholowski
Opis: Klasyfikator k-NN (train and test), umozliwiajacy wyszukiwanie parametru k,
dla ktorego klasyfikator otrzymuje najlepsze wyniki, jak rowniez mozliwosc wyszukiwania
najlepszej kombinacji atrybutow. pozwala na poslugiwanie sie metryka kartezjanska oraz
manhattan. dzieki wielowatkowosci charakteryzuje sie duza szybkoscia.
(k-NN classifier with Euclidean and Manhattan metrics, brute force search of best
parameter k, and attribute combination)
[ sciagnij (download) ]
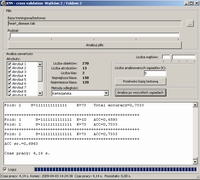
k-NN(CV) autor: Karol Wierzcholowski
Opis: Klasyfikator k-nn, podobne mozliwosci jak k-nn (t&t), zaimplementowana
zostala metoda cross validation (z mozliwoscia wybierania ilosci foldow)
(k-NN classifier with Cross Validation method)
[ sciagnij (download) ]
Hopfield-net - autor: Karol Wierzcholowski
Opis: Program wykorzystujacy siec hopfielda do zapamietywania obrazkow.
Pozwala uzytkownikowi na okreslenie wielkosci matrycy oraz proste uczenie nowych obrazow.
(Demonstration of Hopfield network usefulness - learnig based on images)
[ sciagnij (download) ]
Aproksymator v1.0 (Approximator) autor: Tomasz Kapusta
opis: narzedzie umozliwiajace wyliczanie gornej i dolnej aproksymacji
systemu decyzyjnego i obszaru pozytywnego.
(Generator of lower and upper approximation of decision systems)

[ sciagnij (download) ]
Bramka not (logic gate NOT) autor: Jaroslaw Szatkowski
[ sciagnij (download) ]
Opis: projekt bramki not i wykonanie w wersji fizycznej;
(Hardware project of logic gate NOT)
The other Courses:
- Programming in C++ and Python,
- Algorithms and Data Structures,
- Architecture and Computer Organization,
- Software tools,
- Computer Networks,
- Distributed Systems.